AT_mujin_pc_2016_b ロボットアーム
题目描述
想象一只机器人手臂,将其看作是二维的一条线 $O-A-B-C$,其中 $O$ 这个点固定在原点 $(0,0)$。
如下图所示。
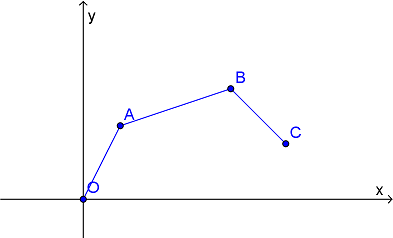
现在,你可以改变 $\angle O,\ \angle A$ 和 $\angle B$ 的角度,但不可以改变任何线段的长度。
现在给定各条线段的长度,你需要计算 $C$ 能到达的范围总面积。
输入格式
$$l_{OA}\ l_{AB}\ l_{BC}$$
输出格式
输出 $C$ 可以到达的范围面积,误差不超过 $10^{-6}$ 都会视作正确答案。
**在最后输出换行。**
### 样例数据
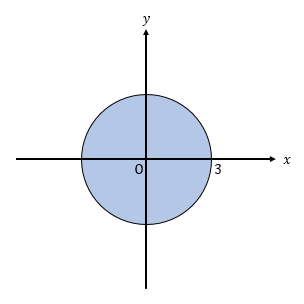
**样例 1**
```
1 1 1
```
```
28.2743338823
```
解释:
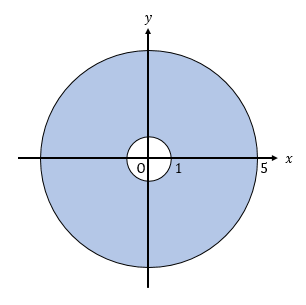
**样例 2**
```
3 1 1
```
```
75.3982236862
```
解释:
**样例 3**
```
16 2 27
```
```
6107.2561185786
```
说明/提示
$1\le l_{OA},\ l_{AB},\ l_{BC}\le 100$
### 翻译贡献
@[hellolin](https://www.luogu.com.cn/user/751017) 译。