SP1701 EOWAMRT - Earth Observation with a Mobile Robot Team
题目描述
一种新型的移动机器人被开发用于进行环境地球观测。它们在地面上移动,通过高精度传感器获取并记录各种观测数据。这些机器人配备了短距离无线通信设备,可以与附近的其他机器人交换数据。它们也具备大容量存储设备,能够记录自己观测到的数据以及从其他机器人接收到的数据。
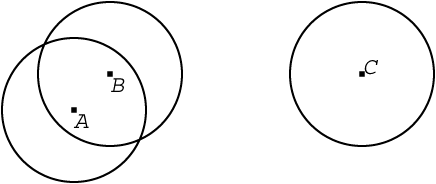
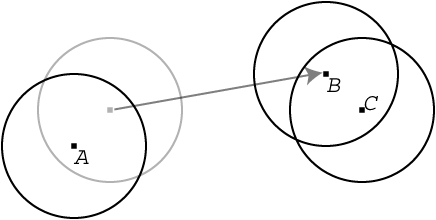
图 1 展示了三个机器人 A、B 和 C 的当前位置及其无线信号的覆盖范围。每个圆圈代表一个机器人的无线覆盖范围,圆心则是机器人的位置。在这个图中,机器人 A 和 B 可以相互通信,但 C 因为距离太远,无法与 A 或 B 进行通信。然而,如图 2 所示,一旦 B 朝向 C 移动,B 和 C 就能够开始互相通信。这种情况下,B 可以将 A 的观测数据传递给 C。图 3 展示了另一个例子,数据可以在多个机器人之间瞬时传播。
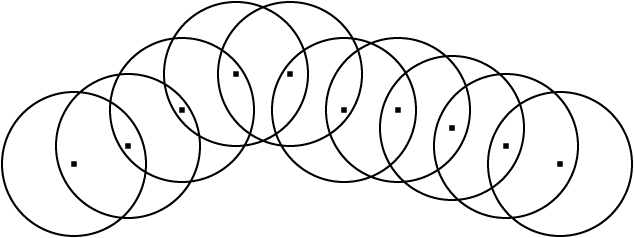
从这些例子中可以看到,如果机器人团队合理地移动,观测数据就能迅速在大范围内的机器人间传播。你的任务是编写一个程序,模拟观测信息在机器人间如何传播。假设数据沟通过程中所需的时间可以忽略不计。
输入格式
输入包含多个数据集,每个数据集格式如下:
```
N T R
第一个机器人的昵称和行进路线
第二个机器人的昵称和行进路线
...
第 N 个机器人的昵称和行进路线
```
第一行包含三个整数,分别是机器人数量 N、模拟时间长度 T 和无线信号的最大传输距离 R,满足 $1 \leq N \leq 100$,$1 \leq T \leq 1000$,$1 \leq R \leq 10$。
每个机器人的昵称和行进路线格式如下:
```
昵称
t0 x0 y0
t1 vx1 vy1
t2 vx2 vy2
...
tk vxk vyk
```
- 昵称是长度为 1 到 8 的字符字符串,仅包含小写字母。每个数据集中的机器人昵称是唯一的。
- 每行由三部分组成,满足:$0 = t_0 < t_1 < ... < t_k = T$ 且 $-10 \leq vx_1, vy_1, ..., vx_k, vy_k \leq 10$。
机器人在二维平面上移动。(x0, y0) 表示机器人在时间 0 的位置。从时间 $t_{i-1}$ 到 $t_i$(0 < i = 10^{-6}。
一个数据集可能包含多个在同一时刻同一位置的机器人,但应考虑到它们能以指定速度移动。
输入以一行 "0 0 0" 结束。
输出格式
对于每个输入数据集,程序应输出在时间 T 前获得第一个机器人在时间 0 获取的数据的机器人的���称。所有昵称按字典顺序排列,每行输出一个,不留额外空格。
**本翻译由 AI 自动生成**